Aplied Control System Course
Description of the Udemy Course
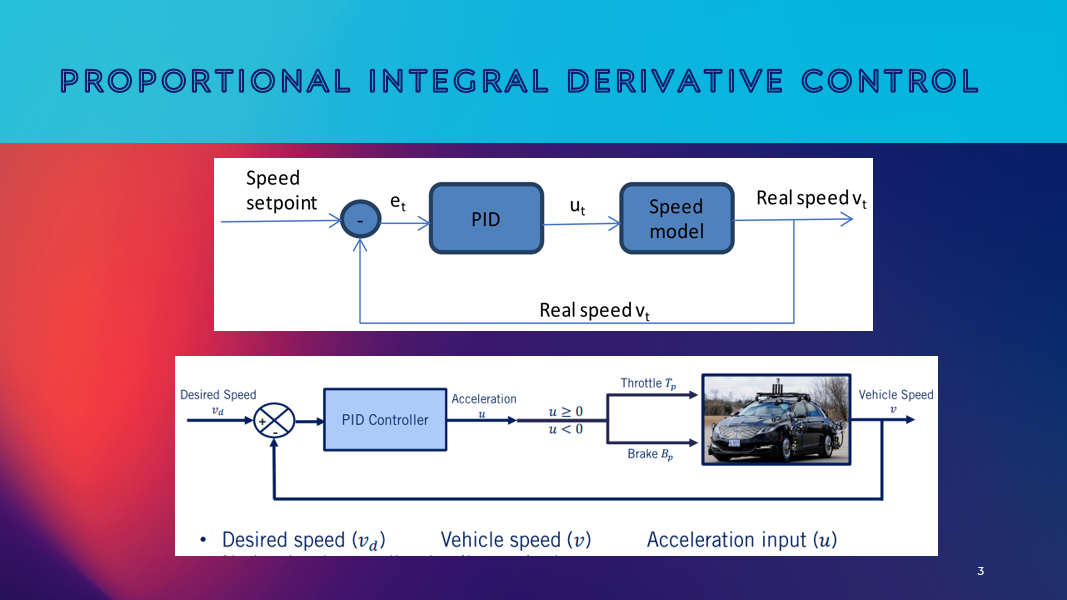
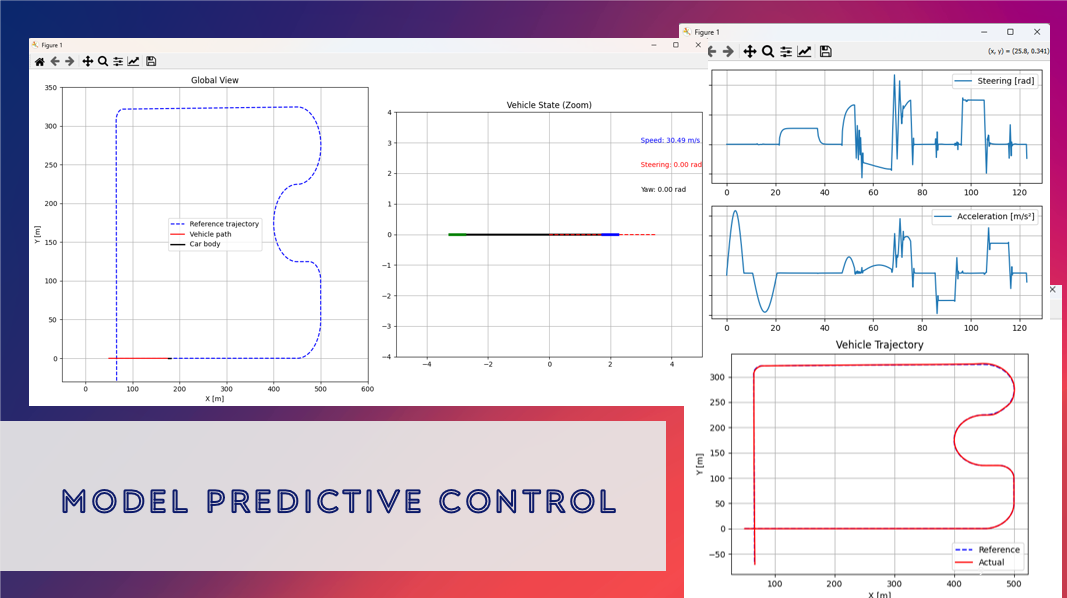
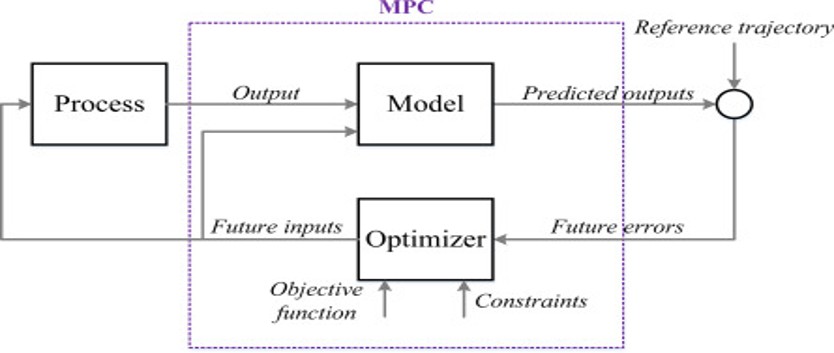
In this course, I gained a solid understanding of control systems used in autonomous vehicles, with a focus on PID (Proportional-Integral-Derivative) and MPC (Model Predictive Control) techniques. I learned how to tune and implement PID controllers for basic vehicle behaviors such as lane keeping and speed regulation, as well as how to model more complex dynamics using MPC.
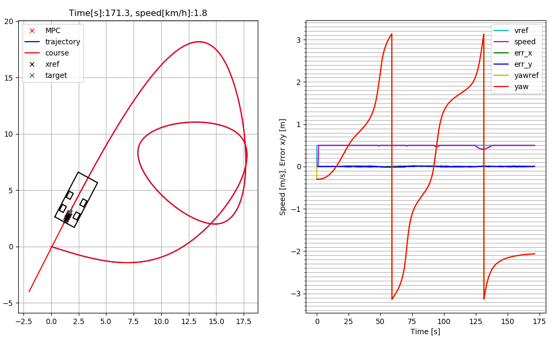
The course emphasized the mathematical foundations behind these controllers, and provided practical examples using Python and simulation environments. I also developed an understanding of path tracking, lateral and longitudinal control, and how to optimize performance under physical constraints like vehicle dynamics and road curvature.
This training significantly improved my ability to design and evaluate controllers for autonomous driving applications, and gave me the tools to compare their performance in real-world-inspired scenarios.
Project information
- Category Autonomous Driving
- Course date19 October, 2024
- Course URL: Udemy Course
- Course Certification: Udemy Diploma